递归式双引擎架构
摘要
递归式双引擎 (Recursive Dual-Engine) 是 Memfit AI 的基础架构创新,旨在解决自主 AI 代理中战略规划与战术执行之间的根本张力。该架构借鉴认知科学的双过程理论 (Kahneman, 2011) 和层次任务网络规划 (Erol et al., 1994),通过嵌套执行模型实现 分形任务分解,其中战略规划可以作为战术执行循环中的原子动作被递归调用。
本文档提供了递归双引擎架构的全面、代码支撑的分析,检视其理论基础、实现细节以及两个组成引擎交互产生的涌现特性。
理论基础
双过程范式
递归式双引擎架构实例化了一个计算性双过程模型,直接汲取认知心理学的灵感:
| 认知系统 | 引擎 | 特征 | 响应时间 | 认知负载 |
|---|---|---|---|---|
| 系统 2 (深思熟虑型) | Plan 引擎 | 目标分解、依赖分析、战略推理 | 秒到分钟级 | 高 |
| 系统 1 (反应型) | ReAct 引擎 | 工具执行、错误恢复、动态适应 | 毫秒到秒级 | 低 |
该设计受以下基础研究启发:
- ReAct: 语言模型中推理与行动的协同 (Yao et al., 2022) — 为战术层提供理论基础,证明交错推理和行动优于纯推理或纯行动方法。
- Plan-and-Solve 提示工程 (Wang et al., 2023) — 确立了复杂任务执行前显式规划的重要性,形成战略层的基础。
- 层次任务网络 (HTN) 规划 (Erol et al., 1994) — 为复杂任务递归分解为原始操作提供形式化框架。
- 双过程理论 (Kahneman, 2011) — 解释为何分离快/慢思维能提高决策质量的认知科学基础。
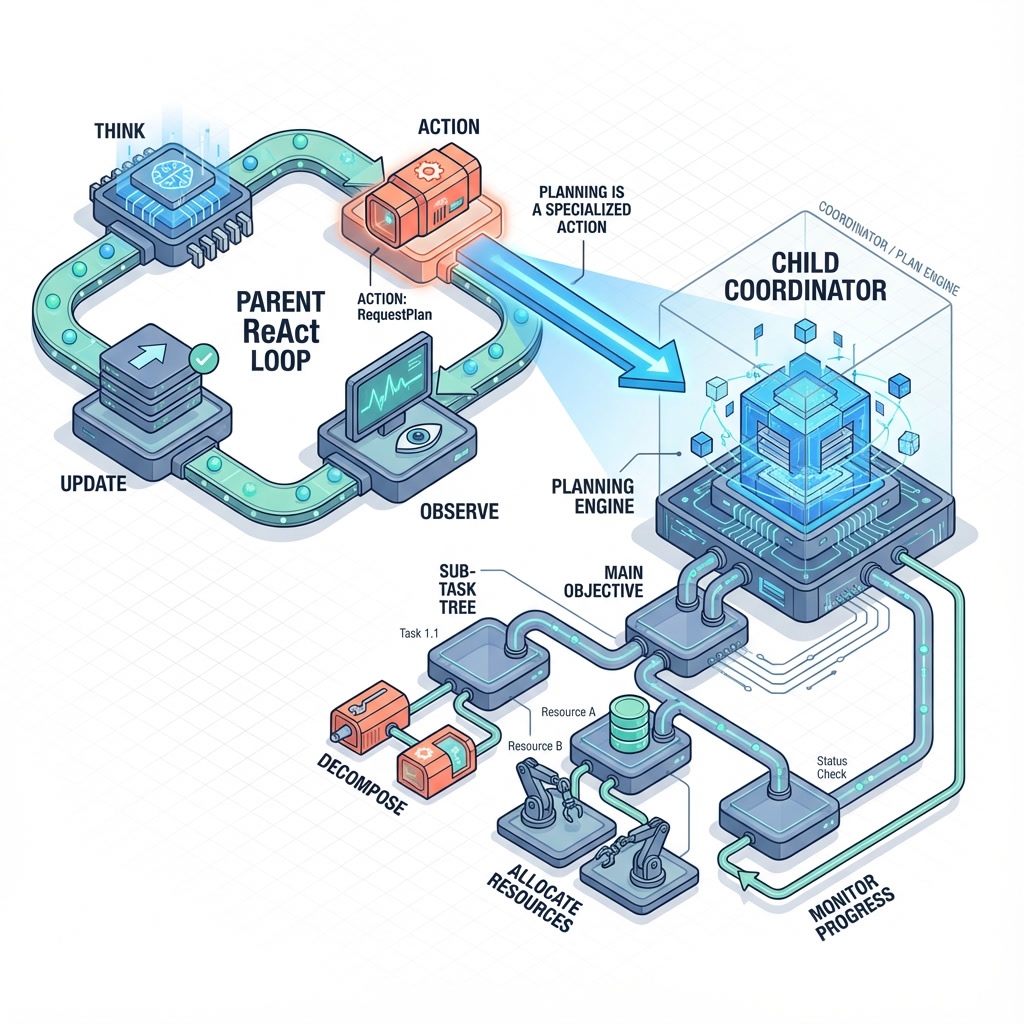
递归原则:规划即动作
关键的架构洞见是 规划本身构成一个有效动作。当 ReAct Loop 遇到超出其即时能力的任务时,它可以调用 Plan 引擎生成子计划,该子计划生成自己的 ReAct Loops 集合。这创建了一种 分形执行结构,任务可以被无限细分,直到它们成为可用工具可解决的原子操作。
这一原则在动作注册中被形式化捕获:
// 来自 loopinfra/action_request_plan_and_execution.go
var loopAction_RequestPlanAndExecution = &reactloops.LoopAction{
AsyncMode: true,
ActionType: schema.AI_REACT_LOOP_ACTION_REQUEST_PLAN_EXECUTION,
Description: `请求详细计划并逐步执行以实现用户目标。`,
ActionHandler: func(loop *reactloops.ReActLoop, action *aicommon.Action,
operator *reactloops.LoopActionHandlerOperator) {
// ReAct Loop 可以将 Plan 引擎作为动作调用
invoker := loop.GetInvoker()
invoker.AsyncPlanAndExecute(task.GetContext(), rewriteQuery, func(err error) {
loop.FinishAsyncTask(task, err)
})
},
}
组合产生的涌现特性
双引擎架构展现出单一引擎无法独立实现的涌现特性:
| 特性 | 仅 Plan 引擎 | 仅 ReAct 引擎 | 组合架构 |
|---|---|---|---|
| 复杂度处理 | 僵化(无法处理意外子任务) | 有限(丢失全局上下文) | 自适应分形分解 |
| 错误恢复 | 差(无运行时适应) | 良好(逐动作) | 多层级恢复 |
| 上下文保持 | 优秀(全局视野) | 差(局部视野) | 层次化上下文流 |
| 执行效率 | 低(过度规划) | 高(反应式) | 最优(按需规划) |
1. 架构概览
1.1 系统分层
系统被组织为三个独立层级,每层具有明确的职责和定义良好的接口:
┌─────────────────────────────────────────────────────────────────────────────┐
│ 层级 1:协调器 (Coordinator) │
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │
│ │ 生命周期 │ │ 上下文 │ │ 事件总线 │ │ 记忆 │ │
│ │ 管理器 │ │ 容器 │ │ 路由器 │ │ 分拣器 │ │
│ └─────────────┘ └─────────────┘ └─────────────┘ └─────────────┘ │
├─────────────────────────────────────────────────────────────────────────────┤
│ 层级 2:Plan 引擎 │
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │
│ │ 任务树 │ │ 依赖关系 │ │ 调度器 │ │ 审查 │ │
│ │ 生成器 │ │ 分析器 │ │ (DFS) │ │ 网关 │ │
│ └─────────────┘ └─────────────┘ └─────────────┘ └─────────────┘ │
├─────────────────────────────────────────────────────────────────────────────┤
│ 层级 3:ReAct 运行时 │
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │
│ │ OODA 循环 │ │ 工具 │ │ 错误 │ │ 自我 │ │
│ │ 执行器 │ │ 调用器 │ │ 恢复 │ │ 反思 │ │
│ └─────────────┘ └─────────────┘ └─────────────┘ └─────────────┘ │
│ ↓ │
│ [可通过 RequestPlanExecution 递归调用层级 2] │
└─────────────────────────────────────────────────────────────────────────────┘
1.2 层级职责
| 层级 | 主要角色 | 关键组件 | 状态所有权 |
|---|---|---|---|
| 协调器 | 编排协调 | Config, Timeline, EventManager | 全局会话状态 |
| Plan 引擎 | 战略规划 | PlanRequest, TaskTree, Scheduler | 任务分解状态 |
| ReAct 运行时 | 战术执行 | ReActLoop, ActionHandlers | 动作执行状态 |
2. 核心数据结构
2.1 AiTask 任务树
基础数据结构是 AiTask,支持带有完整父子关系跟踪的递归任务定义:
// 来自 task.go - 递归任务结构
type AiTask struct {
*Coordinator // 指向编排协调器的引用
*aicommon.AIStatefulTaskBase // 状态管理混入
Index string `json:"index"` // 层次索引 (如 "1-2-3")
Name string `json:"name"` // 人类可读的任务名称
Goal string `json:"goal"` // 任务目标规范
ParentTask *AiTask `json:"parent_task"` // 父任务引用 (根任务为 nil)
Subtasks []*AiTask `json:"subtasks"` // 递归子任务
// 执行状态跟踪
StatusSummary string `json:"status_summary"` // 实时状态
TaskSummary string `json:"task_summary"` // 完成摘要
ShortSummary string `json:"short_summary"` // 简要摘要
LongSummary string `json:"long_summary"` // 详细摘要
// 工具调用跟踪
toolCallResultIds *omap.OrderedMap[int64, *aitool.ToolResult]
}
2.2 层次索引系统
层次索引系统支持跨任意深度嵌套级别的精确任务标识。索引遵循基于路径的表示法,每个级别由连字符分隔:
// 来自 task.go - 递归索引分配
func _assignHierarchicalIndicesRecursive(currentTask *AiTask, currentIndex string) {
if currentTask == nil {
return
}
currentTask.Index = currentIndex
currentTask.SetID(currentIndex)
for i, subTask := range currentTask.Subtasks {
// 子索引 = 父索引 + 子序号 (1-based)
// 示例:父任务 "1-2" → 子任务 "1-2-1", "1-2-2", "1-2-3"
subTaskIndex := fmt.Sprintf("%s-%d", currentIndex, i+1)
_assignHierarchicalIndicesRecursive(subTask, subTaskIndex)
}
}
// GenerateIndex 确保从任意节点开始的一致索引
func (t *AiTask) GenerateIndex() {
if t == nil {
return
}
root := t
// 向上遍历找到实际根节点(带安全限制)
for i := 0; i < 1000 && root.ParentTask != nil; i++ {
root = root.ParentTask
}
// 从根节点开始,索引为 "1"
_assignHierarchicalIndicesRecursive(root, "1")
}
索引方案提供几个关键能力:
| 功能 | 实现 | 示例 |
|---|---|---|
| 唯一标识 | 基于路径的索引 | 任务 "1-2-3" 可唯一寻址 |
| 层次编码 | 连字符分隔的级别 | "1-2-3" 编码 3 级嵌套 |
| 兄弟排序 | 序号后缀 | "1-2-1", "1-2-2" 保持顺序 |
| 快速查找 | 带索引匹配的 DFS 遍历 | O(n),n = 总任务数 |
2.3 任务状态机
任务遵循定义良好的状态机,具有显式转换和事件发射:
// 来自 aicommon/taskif.go - 任务状态定义
type AITaskState string
const (
AITaskState_Created AITaskState = "created" // 实例化后的初始状态
AITaskState_Queueing AITaskState = "queueing" // 在执行队列中等待
AITaskState_Processing AITaskState = "processing" // 正在执行
AITaskState_Completed AITaskState = "completed" // 成功完成
AITaskState_Aborted AITaskState = "aborted" // 失败或异常终止
AITaskState_Skipped AITaskState = "skipped" // 用户主动跳过
)
状态转换具有完整的可观测性:
// 来自 aicommon/taskif.go - 带事件发射的状态转换
func (s *AIStatefulTaskBase) SetStatus(status AITaskState) {
old := s.status
s.status = status
defer func() {
if s.IsFinished() {
s.Cancel() // 终态时清理上下文
}
}()
if old != status {
log.Debugf("Task %s status changed: %s -> %s", s.GetId(), old, status)
if s.Emitter != nil {
// 发射结构化事件用于 UI 更新和日志记录
s.Emitter.EmitStructured("react_task_status_changed", map[string]any{
"react_task_id": s.GetId(),
"react_task_old_status": old,
"react_task_now_status": status,
})
}
}
}
状态转换图:
┌─────────────────────────────────────────┐
│ │
┌────────┐ ┌─▼───────┐ ┌───────────┐ ┌────────▼───┐
│Created │────►│Queueing │────►│Processing │────►│ Completed │
└────────┘ └─────────┘ └─────┬─────┘ └────────────┘
│
┌────────────────┼────────────────┐
▼ ▼
┌──────────┐ ┌──────────┐
│ Aborted │ │ Skipped │
└──────────┘ └──────────┘
3. 协调器 (层级 1)
3.1 角色与职责
Coordinator 作为 系统总线、生命周期管理器 和 上下文容器:
// 来自 coordinator.go - 核心 Coordinator 结构
type Coordinator struct {
*aicommon.Config // 继承的配置
userInput string // 原始用户请求
runtime *runtime // 任务调度器引用
PlanMocker func(config *Coordinator) *PlanResponse // 测试钩子
ContextProvider *PromptContextProvider // 动态上下文注入
ResultHandler func(cod *Coordinator) // 完成回调
rootTask *AiTask // 任务树根节点
}
Coordinator 的职责跨越多个关注点:
| 职责 | 实现 | 影响 |
|---|---|---|
| 会话初始化 | NewCoordinatorContext() | 创建执行环境 |
| 共享记忆管理 | Timeline 对象 | 跨层级保持上下文 |
| 用户交互处理 | Epm (端点管理器) | 处理中断、审查 |
| 事件路由 | InputEventManager | 将事件分发到处理器 |
| 任务树管理 | FindSubtaskByIndex() | 支持动态任务操作 |
3.2 执行生命周期
Coordinator.Run() 方法通过五个不同阶段编排完整的执行生命周期:
// 来自 coordinator.go - 完整的执行编排
func (c *Coordinator) Run() error {
c.registerPEModeInputEventCallback()
c.EmitCurrentConfigInfo()
// ═══════════════════════════════════════════════════════════
// 阶段 1:计划请求创建
// ═══════════════════════════════════════════════════════════
c.EmitInfo("start to create plan request")
planReq, err := c.createPlanRequest(c.userInput)
if err != nil {
c.EmitError("create planRequest failed: %v", err)
return utils.Errorf("coordinator: create planRequest failed: %v", err)
}
// ═══════════════════════════════════════════════════════════
// 阶段 2:计划生成 (AI 驱动的分解)
// ═══════════════════════════════════════════════════════════
c.EmitInfo("start to invoke plan request")
rsp, err := planReq.Invoke()
if err != nil {
c.EmitError("invoke planRequest failed(first): %v", err)
return utils.Errorf("coordinator: invoke planRequest failed: %v", err)
}
// ═══════════════════════════════════════════════════════════
// 阶段 3:人机协同审查
// ═══════════════════════════════════════════════════════════
ep := c.Epm.CreateEndpointWithEventType(schema.EVENT_TYPE_PLAN_REVIEW_REQUIRE)
ep.SetDefaultSuggestionContinue()
c.EmitRequireReviewForPlan(rsp, ep.GetId())
c.DoWaitAgree(c.GetContext(), ep) // 阻塞等待用户响应
params := ep.GetParams()
c.ReleaseInteractiveEvent(ep.GetId(), params)
if params == nil {
c.EmitError("user review params is nil, plan failed")
return utils.Errorf("coordinator: user review params is nil")
}
// ═══════════════════════════════════════════════════════════
// 阶段 4:基于审查的计划细化
// ═══════════════════════════════════════════════════════════
c.EmitInfo("start to handle review plan response")
rsp, err = planReq.handleReviewPlanResponse(rsp, params)
if err != nil {
c.EmitError("handle review plan response failed: %v", err)
return utils.Errorf("coordinator: handle review plan response failed: %v", err)
}
// ═══════════════════════════════════════════════════════════
// 阶段 5:运行时创建和任务执行
// ═══════════════════════════════════════════════════════════
if rsp.RootTask == nil {
c.EmitError("root aiTask is nil, plan failed")
return utils.Errorf("coordinator: root aiTask is nil")
}
root := rsp.RootTask
c.rootTask = root
c.ContextProvider.StoreRootTask(root)
// 验证任务树
if len(root.Subtasks) <= 0 {
c.EmitError("no subtasks found, this task is not a valid task")
return utils.Errorf("coordinator: no subtasks found")
}
// 记录执行计划
log.Infof("create aiTask pipeline: %v", root.Name)
for stepIdx, taskIns := range root.Subtasks {
log.Infof("step %d: %v", stepIdx, taskIns.Name)
}
// 创建并调用运行时调度器
c.EmitInfo("start to create runtime")
rt := c.createRuntime()
c.runtime = rt
return rt.Invoke(root)
}
3.3 任务操作:跳过与重做
Coordinator 支持通过用户发起的事件进行动态任务操作,实现人类监督:
// 来自 coordinator.go - 跳过子任务处理
func (c *Coordinator) HandleSkipSubtaskInPlan(event *ypb.AIInputEvent) error {
// 从事件解析参数
subtaskIndex := utils.InterfaceToString(params["subtask_index"])
userReason := utils.InterfaceToString(params["reason"])
// 通过 DFS 定位目标任务
task := c.FindSubtaskByIndex(subtaskIndex)
if task == nil {
return utils.Errorf("subtask with index %s not found", subtaskIndex)
}
// 更新状态并取消上下文
task.SetStatus(aicommon.AITaskState_Skipped)
task.Cancel()
// 记录到时间线以保持上下文
timelineMessage := fmt.Sprintf("用户主动跳过了当前子任务,原因: %s", userReason)
c.Timeline.PushText(c.AcquireId(),
"[user-skiped-subtask] 任务 %s (%s) 被用户主动跳过: %s",
task.Index, task.Name, timelineMessage)
return nil
}
// 来自 coordinator.go - 通过层次索引查找子任务
func (c *Coordinator) FindSubtaskByIndex(index string) *AiTask {
if c.rootTask == nil {
return nil
}
// 使用 DFS 遍历查找匹配的任务
taskLink := DFSOrderAiTask(c.rootTask)
for i := 0; i < taskLink.Len(); i++ {
task, ok := taskLink.Get(i)
if !ok {
continue
}
if task.Index == index {
return task
}
}
return nil
}
4. Plan 引擎 (层级 2)
4.1 角色与职责
Plan 引擎作为 战略层,负责将复杂目标分解为可执行的子任务树:
| 能力 | 描述 | 实现 |
|---|---|---|
| 目标分解 | 将复杂目标分解为子任务 | planRequest.Invoke() |
| 依赖分析 | 确定执行顺序 | 隐含在子任务排序中 |
| 任务树构建 | 构建层次化 AiTask 结构 | generateAITask() |
| 审查集成 | 允许人工修改 | handleReviewPlanResponse() |
4.2 计划生成过程
计划过程作为专门的 ReAct Loop 实现,产生结构化的任务定义:
// 来自 plan.go - 带任务提取的计划调用
func (pr *planRequest) Invoke() (*PlanResponse, error) {
// 检查模拟/模板计划(测试和领域特定快捷方式)
if pr.cod.PlanMocker != nil {
pr.cod.EmitThoughtStream("mock task", "使用模版预设任务")
planRes := pr.cod.PlanMocker(pr.cod)
if utils.IsNil(planRes) {
return nil, utils.Error("planMocker returns nil, unknown error")
}
return planRes, nil
}
var rootTask = pr.cod.generateAITaskWithName("root-default", "root-default")
// 确保计划提取后配置传播
defer func() {
var propagateConfig func(task *AiTask)
propagateConfig = func(task *AiTask) {
if task == nil {
return
}
task.Coordinator = pr.cod
for _, sub := range task.Subtasks {
sub.ParentTask = task // 建立父子链接
propagateConfig(sub)
}
}
propagateConfig(rootTask)
rootTask.GenerateIndex() // 分配层次索引
}()
// 为规划阶段创建专用任务
planTask := aicommon.NewStatefulTaskBase(
"plan-task",
pr.rawInput,
pr.cod.Ctx,
pr.cod.Emitter,
true,
)
// 执行计划生成 ReAct Loop
err := pr.cod.ExecuteLoopTask(
schema.AI_REACT_LOOP_NAME_PLAN,
planTask,
reactloops.WithOnPostIteraction(func(loop *reactloops.ReActLoop,
iteration int, task aicommon.AIStatefulTask, isDone bool, reason any) {
if isDone {
// 从 AI 响应提取结构化计划
planData := loop.Get(loop_plan.PLAN_DATA_KEY)
action, err := aicommon.ExtractAction(planData, "plan", "plan")
if err != nil {
log.Errorf("extract action from plan data failed: %v", err)
return
}
// 从提取的数据构建根任务
rootTask = pr.cod.generateAITaskWithName(
action.GetAnyToString("main_task"),
action.GetAnyToString("main_task_goal"))
// 构建子任务
for _, subtask := range action.GetInvokeParamsArray("tasks") {
if subtask.GetAnyToString("subtask_name") == "" {
continue
}
rootTask.Subtasks = append(rootTask.Subtasks,
pr.cod.generateAITask(subtask))
}
}
}))
if err != nil {
return nil, err
}
return pr.cod.newPlanResponse(rootTask), nil
}
4.3 计划模式定义
AI 根据严格的 JSON 模式生成计划,确保结构化、可解析的输出:
// 来自 jsonschema/plan/plan.json - 计划模式定义
{
"type": "object",
"required": ["main_task", "main_task_goal", "tasks"],
"properties": {
"main_task": {
"type": "string",
"description": "捕获用户请求完整范围的精炼、综合任务描述。"
},
"main_task_goal": {
"type": "string",
"description": "定义主任务成功完成的具体、可衡量目标。"
},
"tasks": {
"type": "array",
"description": "将主任务分解为可执行步骤的有序子任务列表。",
"items": {
"type": "object",
"required": ["subtask_name", "subtask_goal"],
"properties": {
"subtask_name": {
"type": "string",
"description": "使用 '动词+名词' 格式的简洁名称(如 '分析需求'、'部署服务')。"
},
"subtask_goal": {
"type": "string",
"description": "此子任务具有明确完成标准的具体目标。"
}
}
}
}
}
}
4.4 任务生成与上下文保持
每个任务在添加结构化元数据的同时保持原始用户上下文:
// 来自 plan.go - 带上下文注入的任务生成
func (c *Coordinator) generateAITaskWithName(name, goal string) *AiTask {
task := &AiTask{
Coordinator: c,
Name: name,
Goal: goal,
}
// 创建带格式化输入的有状态任务基类
taskBase := aicommon.NewStatefulTaskBase(
"plan-task"+uuid.NewString(),
fmt.Sprintf("任务名称: %s\n任务目标: %s", task.Name, task.Goal),
c.Ctx,
c.Emitter,
true,
)
task.AIStatefulTaskBase = taskBase
// 注入原始用户输入以保持上下文
nonce := utils.RandStringBytes(4)
taskInput := task.GetUserInput()
enhancedInput := utils.MustRenderTemplate(`
<|用户原始需求_{{.nonce}}|>
{{ .RawUserInput }}
<|用户原始需求_END_{{.nonce}}|>
---
{{ .Origin }}
`,
map[string]any{
"nonce": nonce,
"RawUserInput": c.userInput,
"Origin": taskInput,
})
task.SetUserInput(enhancedInput)
return task
}
5. ReAct 运行时 (层级 3)
5.1 角色与职责
ReAct 运行时作为 战术层,通过迭代的 OODA(观察-调整-决策-行动)循环执行原子任务:
// 来自 reactloops/reactloop.go - ReActLoop 结构
type ReActLoop struct {
invoker aicommon.AIInvokeRuntime
config aicommon.AICallerConfigIf
emitter *aicommon.Emitter
maxIterations int // 迭代安全限制
loopName string // 循环类型标识符
// 能力开关(动态功能切换)
allowAIForge func() bool // AI 蓝图调用
allowPlanAndExec func() bool // 递归规划
allowRAG func() bool // 检索增强生成
allowToolCall func() bool // 外部工具调用
allowUserInteract func() bool // 用户交互请求
// 动作管理
actions *omap.OrderedMap[string, *LoopAction]
loopActions *omap.OrderedMap[string, LoopActionFactory]
streamFields *omap.OrderedMap[string, *LoopStreamField]
aiTagFields *omap.OrderedMap[string, *LoopAITagField]
// 记忆管理
memorySizeLimit int
currentMemories *omap.OrderedMap[string, *aicommon.MemoryEntity]
memoryTriage aicommon.MemoryTriage
// 自我反思支持
enableSelfReflection bool
// 自旋检测阈值
sameActionTypeSpinThreshold int
sameLogicSpinThreshold int
// 动作历史用于模式检测
actionHistory []*ActionRecord
actionHistoryMutex *sync.Mutex
currentIterationIndex int
}
5.2 OODA 执行循环
每次 ReAct 迭代遵循 OODA(观察-调整-决策-行动)循环,增强了自我反思:
// 来自 reactloops/exec.go - 主执行循环
LOOP:
for {
iterationCount++
// ═══════════════════════════════════════════════════════════
// 安全边界:最大迭代检查
// ═══════════════════════════════════════════════════════════
if iterationCount > maxIterations {
r.finishIterationLoopWithError(iterationCount, task,
utils.Errorf("达到最大迭代次数 (%d),停止代码生成循环", maxIterations))
log.Warnf("Reached max iterations (%d), stopping code generation loop", maxIterations)
needSummary.SetTo(true)
break LOOP
}
// ═══════════════════════════════════════════════════════════
// OBSERVE 阶段:加载上下文和记忆
// ═══════════════════════════════════════════════════════════
waitMem := make(chan struct{})
go func() {
defer close(waitMem)
r.fastLoadSearchMemoryWithoutAI(task.GetUserInput())
}()
r.loadingStatus("记忆快速装载中 / waiting for fast memories to load...")
select {
case <-task.GetContext().Done():
return utils.Errorf("task context done before execute ReActLoop")
case <-waitMem:
r.loadingStatus("记忆已装载 / memories loaded")
case <-time.After(200 * time.Millisecond):
r.loadingStatus("跳过快速记忆装载,原因:超时")
}
// ═══════════════════════════════════════════════════════════
// ORIENT 阶段:生成带完整上下文的提示
// ═══════════════════════════════════════════════════════════
r.loadingStatus("执行中... / executing...")
prompt, finalError = r.generateLoopPrompt(
nonce,
task.GetUserInput(),
r.GetCurrentMemoriesContent(),
operator,
)
if finalError != nil {
r.finishIterationLoopWithError(iterationCount, task, finalError)
return finalError
}
// ═══════════════════════════════════════════════════════════
// DECIDE 阶段:AI 决定下一个动作
// ═══════════════════════════════════════════════════════════
streamWg := new(sync.WaitGroup)
actionParams, handler, transactionErr := r.callAITransaction(streamWg, prompt, nonce)
if transactionErr != nil {
r.finishIterationLoopWithError(iterationCount, task, transactionErr)
break LOOP
}
if utils.IsNil(actionParams) {
r.finishIterationLoopWithError(iterationCount, task,
utils.Error("action is nil in ReActLoop"))
break LOOP
}
// ═══════════════════════════════════════════════════════════
// ACT 阶段:执行选定的动作
// ═══════════════════════════════════════════════════════════
actionName := actionParams.Name()
r.loadingStatus(fmt.Sprintf("[%v]执行中 / [%v] executing action...", actionName, actionName))
// 记录动作用于历史跟踪和自旋检测
r.actionHistoryMutex.Lock()
r.currentIterationIndex = iterationCount
actionRecord := &ActionRecord{
ActionType: actionParams.ActionType(),
ActionName: actionName,
ActionParams: make(map[string]interface{}),
IterationIndex: iterationCount,
}
for k, v := range actionParams.GetParams() {
actionRecord.ActionParams[k] = v
}
r.actionHistory = append(r.actionHistory, actionRecord)
r.actionHistoryMutex.Unlock()
// 添加迭代信息到时间线
msg := fmt.Sprintf("[%v]======== ReAct iteration %d ========", loopName, iterationCount)
if reason := actionParams.GetString("human_readable_thought"); reason != "" {
msg += "\nReason/Next-Step: " + reason
}
r.GetInvoker().AddToTimeline("iteration", msg)
// 执行动作处理器
actionStartTime := time.Now()
handler.ActionHandler(r, actionParams, operator)
actionExecutionDuration := time.Since(actionStartTime)
// ═══════════════════════════════════════════════════════════
// REFLECT 阶段:自我评估(如果启用)
// ═══════════════════════════════════════════════════════════
reflectionLevel := r.shouldTriggerReflection(handler, operator, iterationCount)
if reflectionLevel != ReflectionLevel_None {
r.loadingStatus(fmt.Sprintf("[%v]反思中 / [%v] self-reflecting...", actionName, actionName))
r.executeReflection(handler, actionParams, operator, reflectionLevel,
iterationCount, actionExecutionDuration)
}
// 检查终止条件
if isTerminated, err := operator.IsTerminated(); isTerminated {
log.Infof("ReactLoop[%v] terminated", r.loopName)
if err != nil {
finalError = err
r.finishIterationLoopWithError(iterationCount, task, finalError)
return finalError
}
r.finishIterationLoopWithError(iterationCount, task, nil)
return nil
}
// 处理异步模式转换
if handler.AsyncMode {
r.loadingStatus("当前任务进入异步模式 / Async mode, ending loop")
r.finishIterationLoopWithError(iterationCount, task, nil)
return nil
}
}
5.3 动作历史跟踪
每个动作都被记录用于自旋检测、调试和模式分析:
// 来自 reactloops/reactloop.go - 动作记录结构
type ActionRecord struct {
ActionType string `json:"action_type"`
ActionName string `json:"action_name"`
ActionParams map[string]interface{} `json:"action_params"`
IterationIndex int `json:"iteration_index"`
}
动作历史支持复杂的模式检测:
| 检测类型 | 实现 | 目的 |
|---|---|---|
| 相同动作类型自旋 | IsInSameActionTypeSpin() | 检测重复动作 |
| 逻辑自旋 | IsInSameLogicSpinWithAI() | AI 驱动的语义分析 |
| 迭代跟踪 | currentIterationIndex | 进度监控 |
6. 递归机制
6.1 规划即动作
关键创新是将 Plan 引擎注册为 ReAct Loop 内的标准动作,实现无缝递归调用:
// 来自 loopinfra/action_request_plan_and_execution.go
var loopAction_RequestPlanAndExecution = &reactloops.LoopAction{
AsyncMode: true, // 不阻塞当前循环
ActionType: schema.AI_REACT_LOOP_ACTION_REQUEST_PLAN_EXECUTION,
Description: `请求详细计划并逐步执行以实现用户目标。`,
Options: []aitool.ToolOption{
aitool.WithStringParam(
"plan_request_payload",
aitool.WithParam_Description("提供需要多步骤计划的复杂任务的一句话摘要。"),
),
},
StreamFields: []*reactloops.LoopStreamField{
{FieldName: `plan_request_payload`},
},
ActionVerifier: func(loop *reactloops.ReActLoop, action *aicommon.Action) error {
// 防止嵌套计划执行冲突
invoker := loop.GetInvoker()
if reactInvoker, ok := invoker.(interface {
GetCurrentPlanExecutionTask() aicommon.AIStatefulTask
}); ok {
if reactInvoker.GetCurrentPlanExecutionTask() != nil {
return utils.Errorf("另一个计划执行任务正在运行," +
"请等待其完成或使用 directly_answer")
}
}
improveQuery := action.GetString("plan_request_payload")
if improveQuery == "" {
improveQuery = action.GetInvokeParams("next_action").GetString("plan_request_payload")
}
if improveQuery == "" {
return utils.Errorf("request_plan_and_execution 动作必须有 'plan_request_payload' 字段")
}
loop.Set("plan_request_payload", improveQuery)
return nil
},
ActionHandler: func(loop *reactloops.ReActLoop, action *aicommon.Action,
operator *reactloops.LoopActionHandlerOperator) {
task := operator.GetTask()
rewriteQuery := loop.Get("plan_request_payload")
invoker := loop.GetInvoker()
// 带完成回调的异步调用计划和执行
invoker.AsyncPlanAndExecute(task.GetContext(), rewriteQuery, func(err error) {
loop.FinishAsyncTask(task, err)
})
},
}
6.2 递归调用实现
当 ReAct 引擎触发子计划时,它通过事件镜像创建具有共享上下文的新 Coordinator:
// 来自 aireact/invoke_plan_and_execute.go
func (r *ReAct) invokePlanAndExecute(doneChannel chan struct{}, ctx context.Context,
planPayload string, forgeName string, forgeParams any) (finalErr error) {
doneOnce := new(sync.Once)
done := func() {
doneOnce.Do(func() { close(doneChannel) })
}
defer func() {
done()
if err := recover(); err != nil {
log.Errorf("invokePlanAndExecute panic: %v", err)
utils.PrintCurrentGoroutineRuntimeStack()
}
}()
uid := uuid.New().String()
params := map[string]any{
"re-act_id": r.config.Id,
"re-act_task": r.GetCurrentTask().GetId(),
"coordinator_id": uid,
}
r.EmitJSON(schema.EVENT_TYPE_START_PLAN_AND_EXECUTION, r.config.Id, params)
defer func() {
if finalErr != nil {
r.EmitPlanExecFail(finalErr.Error())
}
r.EmitJSON(schema.EVENT_TYPE_END_PLAN_AND_EXECUTION, r.config.Id, params)
}()
if ctx == nil {
ctx = r.config.Ctx
}
planCtx, cancel := context.WithCancel(ctx)
defer cancel()
// ═══════════════════════════════════════════════════════════
// 事件镜像:将父级事件流桥接到子级
// ═══════════════════════════════════════════════════════════
inputChannel := chanx.NewUnlimitedChan[*ypb.AIInputEvent](r.config.Ctx, 10)
r.config.InputEventManager.RegisterMirrorOfAIInputEvent(uid, func(event *ypb.AIInputEvent) {
go func() {
switch event.SyncType {
case SYNC_TYPE_QUEUE_INFO:
// 队列信息单独处理
default:
log.Infof("InvokePlanAndExecute: Received AI input event: %v", event)
}
inputChannel.SafeFeed(event)
}()
})
defer func() {
r.config.InputEventManager.UnregisterMirrorOfAIInputEvent(uid)
}()
// ═══════════════════════════════════════════════════════════
// 创建具有继承上下文的子 Coordinator
// ═══════════════════════════════════════════════════════════
baseOpts := aicommon.ConvertConfigToOptions(r.config)
baseOpts = append(baseOpts,
aicommon.WithID(uid),
aicommon.WithTimeline(r.config.Timeline), // 共享时间线以保持上下文连续!
aicommon.WithAICallback(r.config.OriginalAICallback),
aicommon.WithEventInputChanx(inputChannel),
aicommon.WithContext(planCtx),
aicommon.WithPersistentSessionId(r.config.PersistentSessionId),
)
cod, err := aid.NewCoordinatorContext(planCtx, planPayload, baseOpts...)
if err != nil {
return utils.Errorf("failed to create coordinator: %v", err)
}
return cod.Run()
}
6.3 上下文嵌套与继承
子 Coordinator 继承父级的 Timeline,实现跨递归级别的无缝上下文传播:
┌─────────────────────────────────────────────────────────────────────────────┐
│ 父 ReAct Loop (SessionID: A) │
│ ├── Timeline: 共享 │
│ ├── Context: ctx-parent │
│ └── 触发: RequestPlanExecution │
│ ↓ │
├─────────────────────────────────────────────────────────────────────────────┤
│ 子 Coordinator (SessionID: B, 继承自 A) │
│ ├── Timeline: 继承自父级(写入对父级可见) │
│ ├── Context: ctx-child (派生自 ctx-parent) │
│ ├── EventMirror: 接收来自父级 InputEventManager 的事件 │
│ └── 创建: 具有自己层次索引的新任务树 │
│ ↓ │
├─────────────────────────────────────────────────────────────────────────────┤
│ 子 ReAct Loops(针对每个叶子任务) │
│ ├── Timeline: 同一共享实例 │
│ └── 可以递归触发更多 RequestPlanExecution 动作 │
└─────────────────────────────────────────────────────────────────────────────┘
此架构确保:
| 属性 | 机制 | 好处 |
|---|---|---|
| 上下文连续性 | 共享 Timeline | 子动作对父级可见 |
| 事件传播 | 镜像回调 | 用户中断到达所有级别 |
| 资源隔离 | 派生上下文 | 取消正确传播 |
| 索引独立性 | 独立任务树 | 索引不冲突 |
7. 任务调度与执行
7.1 运行时调度器
runtime 结构使用深度优先搜索遍历管理任务调度:
// 来自 runtime.go - 运行时调度器结构
type runtime struct {
RootTask *AiTask // 任务树根节点
config *Coordinator // 指向 coordinator 的引用
currentIndex int // 遍历中的当前位置
TaskLink *linktable.LinkedList[*AiTask] // 线性化的任务序列
statusMutex sync.Mutex // 状态更新同步
}
func (c *Coordinator) createRuntime() *runtime {
r := &runtime{
config: c,
TaskLink: linktable.New[*AiTask](),
}
return r
}
7.2 DFS 遍历算法
任务按深度优先顺序处理,确保父上下文在子任务之前建立:
// 来自 task_dfs.go - DFS 遍历实现
func DFSOrderAiTask(root *AiTask) *linktable.LinkedList[*AiTask] {
result := linktable.New[*AiTask]()
treeStack := []*AiTask{root}
for len(treeStack) > 0 {
// 从栈中弹出节点
lastIndex := len(treeStack) - 1
currentTask := treeStack[lastIndex]
treeStack = treeStack[:lastIndex]
result.PushBack(currentTask)
// 逆序压入子节点(最右边的先入栈)
// 这确保最左边的子节点先被处理
children := currentTask.Subtasks
for i := len(children) - 1; i >= 0; i-- {
treeStack = append(treeStack, children[i])
}
}
return result
}
// 后序遍历变体用于清理操作
func DFSOrderAiTaskPostOrder(root *AiTask) *linktable.LinkedList[*AiTask] {
result := linktable.New[*AiTask]()
if root == nil {
return result
}
treeStack := make([]*AiTask, 0)
var lastVisited *AiTask
treeStack = append(treeStack, root)
for len(treeStack) > 0 {
peekNode := treeStack[len(treeStack)-1]
// 访问条件:
// 1. 叶子节点(无子节点)
// 2. 所有子节点已被访问
isLeaf := len(peekNode.Subtasks) == 0
allChildrenVisited := !isLeaf && lastVisited == peekNode.Subtasks[len(peekNode.Subtasks)-1]
if isLeaf || allChildrenVisited {
result.PushBack(peekNode)
treeStack = treeStack[:len(treeStack)-1]
lastVisited = peekNode
} else {
// 从右到左压入子节点以实现从左到右处理
for i := len(peekNode.Subtasks) - 1; i >= 0; i-- {
treeStack = append(treeStack, peekNode.Subtasks[i])
}
}
}
return result
}
7.3 带状态管理的任务执行
运行时以全面的状态管理调用任务:
// 来自 runtime.go - 带状态处理的任务调用
func (r *runtime) Invoke(task *AiTask) error {
if r.RootTask == nil {
r.RootTask = task
}
r.updateTaskLink() // 构建 DFS 遍历顺序
r.currentIndex = 0
invokeTask := func(current *AiTask) error {
// 检查用户主动跳过(Skipped ≠ Aborted)
if current.GetStatus() == aicommon.AITaskState_Skipped {
r.config.EmitInfo("subtask %s was skipped by user, moving to next task", current.Name)
return nil
}
// 检查全局上下文取消
if r.config.IsCtxDone() {
return utils.Errorf("coordinator context is done")
}
// 检查任务局部上下文(可能被 skip/redo 重置)
if current.IsCtxDone() {
if current.GetStatus() == aicommon.AITaskState_Skipped {
r.config.EmitInfo("subtask %s context cancelled (skipped), moving to next task", current.Name)
return nil
}
return utils.Errorf("task context is done")
}
r.config.EmitInfo("invoke subtask: %v", current.Name)
// 只有叶子节点(无子任务)被执行
if len(current.Subtasks) == 0 {
current.SetStatus(aicommon.AITaskState_Processing)
}
r.config.EmitPushTask(current)
defer func() {
r.config.EmitUpdateTaskStatus(current)
r.config.EmitPopTask(current)
}()
// 只执行叶子节点
if len(current.Subtasks) == 0 {
return current.executeTaskPushTaskIndex()
}
return nil // 非叶子节点只是组织性的
}
// 主执行循环
for {
currentTask, ok := r.NextStep()
if !ok {
return nil // 所有任务完成
}
if err := invokeTask(currentTask); err != nil {
// 处理用户主动跳过 vs 实际失败
isSkipped := currentTask.GetStatus() == aicommon.AITaskState_Skipped
isContextCanceled := strings.Contains(err.Error(), "context canceled") ||
strings.Contains(err.Error(), "context done")
if isSkipped || (isContextCanceled && currentTask.GetStatus() == aicommon.AITaskState_Skipped) {
r.config.EmitInfo("task %s was skipped by user, continuing to next task", currentTask.Name)
continue
}
// 检查全局取消
if r.config.IsCtxDone() {
r.config.EmitInfo("coordinator context cancelled, stopping execution")
return err
}
r.config.EmitPlanExecFail("invoke task[%s] failed: %v", currentTask.Name, err)
r.config.EmitError("invoke subtask failed: %v", err)
log.Errorf("invoke subtask failed: %v", err)
return err
}
}
}
func (r *runtime) updateTaskLink() {
if r.RootTask == nil {
return
}
r.TaskLink = DFSOrderAiTask(r.RootTask)
}
7.4 带上下文传播的叶子节点执行
任务执行包括复杂的上下文传播:
// 来自 task_execute.go - 带父上下文的任务执行
func (t *AiTask) GetUserInput() string {
if utils.IsNil(t.ParentTask) {
return t.AIStatefulTaskBase.GetUserInput()
}
var buf bytes.Buffer
// 收集父任务链输入(递归最多 20 级)
var collectParentInputs func(task *AiTask, depth int) []string
collectParentInputs = func(task *AiTask, depth int) []string {
if task == nil || task.ParentTask == nil || depth >= 20 {
return nil
}
var inputs []string
// 首先收集更高层级的父输入
if task.ParentTask.ParentTask != nil {
inputs = collectParentInputs(task.ParentTask, depth+1)
}
// 然后添加当前父级的输入
if task.ParentTask.AIStatefulTaskBase != nil {
input := task.ParentTask.AIStatefulTaskBase.GetUserInput()
if input != "" {
inputs = append(inputs, input)
}
}
return inputs
}
var parentInputs []string
if !utils.IsNil(t.ParentTask) {
parentInputs = collectParentInputs(t, 0)
}
var currentInput string
if t.AIStatefulTaskBase != nil {
currentInput = t.AIStatefulTaskBase.GetUserInput()
}
// 格式化输出,清晰划分
if len(parentInputs) > 0 {
buf.WriteString("<|PARENT_TASK|>\n")
for i, input := range parentInputs {
if i > 0 {
buf.WriteString("\n")
}
buf.WriteString(input)
}
buf.WriteString("\n<|PARENT_TASK_END|>\n\n")
}
buf.WriteString("<|CURRENT_TASK|>\n")
if currentInput != "" {
buf.WriteString(currentInput)
}
buf.WriteString("\n<|CURRENT_TASK_END|>\n\n")
// 添加执行指南
buf.WriteString("<|INSTRUCTION|>\n")
buf.WriteString("## 任务执行原则\n\n")
buf.WriteString("**核心要求**:请专注于完成 `<|CURRENT_TASK|>` 中定义的任务目标。\n\n")
buf.WriteString("**父任务的作用**:`<|PARENT_TASK|>` 中的信息仅作为上下文参考...\n")
return buf.String()
}
8. 进度跟踪与可视化
8.1 层次化进度显示
系统为 AI 上下文和用户可视化生成人类可读的进度指示器:
// 来自 runtime.go - 进度渲染
func (t *AiTask) dumpProgressEx(i int, w io.Writer, details bool) {
prefix := strings.Repeat(" ", i)
executing := false
finished := false
// 确定非叶子节点的聚合状态
if len(t.Subtasks) > 0 {
allFinished := true
haveExecutedTask := false
for _, subtask := range t.Subtasks {
if !subtask.executed() {
allFinished = false
} else if !haveExecutedTask && subtask.executed() {
haveExecutedTask = true
}
}
if haveExecutedTask && !allFinished {
executing = true
} else if allFinished {
finished = true
}
} else {
finished = t.executed()
}
var fill = " "
var note string
if finished {
fill = "x"
if t.TaskSummary != "" {
note = fmt.Sprintf(" (Finished:%s)", t.TaskSummary)
}
} else if executing {
fill = "~"
note = " (部分完成)"
}
if t.executing() {
fill = "-"
note = " (执行中)"
if ret := t.SingleLineStatusSummary(); ret != "" {
note += fmt.Sprintf(" (status:%s)", ret)
}
}
taskNameShow := strconv.Quote(t.Name)
if details {
if t.Goal != "" {
taskNameShow = taskNameShow + "(目标:" + strconv.Quote(t.Goal) + ")"
}
if t.Index != "" {
taskNameShow = t.Index + ". " + taskNameShow
}
}
if strings.TrimSpace(note) == "" {
note = "(未开始)"
}
fmt.Fprintf(w, "%s -[%v] %s %v\n", prefix, fill, taskNameShow, note)
// 递归渲染子任务
if len(t.Subtasks) > 0 {
for _, subtask := range t.Subtasks {
subtask.dumpProgressEx(i+1, w, details)
}
}
}
示例输出可视化:
-[x] 1. "分析安全需求" (Finished: 识别了 5 个关键区域)
-[x] 1-1. "审查认证" (Finished: OAuth2 实现已验证)
-[-] 1-2. "审计授权" (执行中) (status: 检查角色权限)
-[ ] 1-3. "检查加密" (未开始)
-[~] 2. "实施修复" (部分完成)
-[x] 2-1. "更新认证模块" (Finished: 添加了 MFA 支持)
-[ ] 2-2. "应用安全补丁" (未开始)
8.2 进度感知的上下文注入
每次 ReAct 迭代通过响应式数据构建接收当前进度上下文:
// 来自 task_execute.go - 进度上下文注入
reactloops.WithReactiveDataBuilder(func(loop *reactloops.ReActLoop,
feedback *bytes.Buffer, nonce string) (string, error) {
reactiveData := utils.MustRenderTemplate(`
当前 Plan-Execution 模式进度信息:
<|PROGRESS_TASK_{{.Nonce}}|>
{{ .Progress }}
--- CURRENT_TASK ---
{{ .CurrentProgress }}
--- CURRENT_TASK_END ---
<|PROGRESS_TASK_END_{{ .Nonce }}|>
- 进度信息语义约定:
1) 任务树状态约定
- 标记含义:
- [-] 表示该节点任务"执行中"
- [ ] 表示该节点任务"未开始"
- [x] 表示该节点任务"已完成"
- 层级缩进表示父子任务关系
2) 当前任务边界
- "当前任务(CURRENT_TASK)"指明你唯一允许推进的任务节点
3) 行为准则(必须遵守)
- 不要假设或回填未在进度信息中出现的状态
- 不要"预完成"尚未执行的步骤
4) 只读规则(重要)
- 进度信息对 AI 是只读的
- 框架会根据实际执行进度自动更新任务清单与状态
`, map[string]interface{}{
"Progress": t.rootTask.Progress(),
"CurrentProgress": t.Progress(),
"Nonce": nonce,
})
return reactiveData, nil
})
9. AI 蓝图 (Forges):预编译的计划模板
9.1 概念
AI 蓝图(内部称为 "Forges")是预定义的计划模板,可作为专门的递归 Plan Execution 调用。它们支持具有预配置参数的领域特定自动化:
// 来自 loopinfra/action_require_ai_blueprint_forge.go
var loopAction_RequireAIBlueprintForge = &reactloops.LoopAction{
AsyncMode: true,
ActionType: schema.AI_REACT_LOOP_ACTION_REQUIRE_AI_BLUEPRINT,
Description: `请求 AI 蓝图来完成需要专业 AI 能力的复杂任务。`,
Options: []aitool.ToolOption{
aitool.WithStringParam(
"blueprint_payload",
aitool.WithParam_Description("提供要使用的 AI 蓝图名称。"),
),
},
ActionHandler: func(loop *reactloops.ReActLoop, action *aicommon.Action,
operator *reactloops.LoopActionHandlerOperator) {
forgeName := action.GetString("blueprint_payload")
invoker := loop.GetInvoker()
task := operator.GetTask()
invoker.RequireAIForgeAndAsyncExecute(task.GetContext(), forgeName, func(err error) {
loop.FinishAsyncTask(task, err)
})
},
}
9.2 蓝图调用流程
// 来自 aireact/invoke_plan_and_execute.go - 蓝图调用
func (r *ReAct) RequireAIForgeAndAsyncExecute(
ctx context.Context, forgeName string, onFinished func(error)) {
// 验证蓝图名称
if forgeName == "" {
errMsg := "AI 蓝图名称为空,无法执行"
r.AddToTimeline("[BLUEPRINT_EMPTY_NAME]", errMsg)
r.Emitter.EmitError(errMsg)
onFinished(utils.Error(errMsg))
return
}
// 记录调用尝试
r.AddToTimeline("[BLUEPRINT_INVOKE_START]",
fmt.Sprintf("Invoking AI Blueprint: %s", forgeName))
// 查找并验证蓝图
ins, forgeParams, err := r.invokeBlueprint(forgeName)
if err != nil {
r.AddToTimeline("[BLUEPRINT_INVOKE_FAILED]",
fmt.Sprintf("Failed to invoke '%s': %v", forgeName, err))
r.Emitter.EmitError(fmt.Sprintf("Failed to invoke AI Blueprint '%s'", forgeName))
onFinished(fmt.Errorf("failed to invoke ai-blueprint[%v]: %w", forgeName, err))
return
}
// 使用蓝图参数调用计划
r.invokePlanAndExecute(taskDone, ctx, "", forgeName, forgeParams)
}
9.3 蓝图查找与参数提取
// 来自 aireact/invoke_blueprint.go - 蓝图解析
func (r *ReAct) invokeBlueprint(forgeName string) (*schema.AIForge, aitool.InvokeParams, error) {
manager := r.config.AiForgeManager
// 在注册表中查找蓝图
ins, err := manager.GetAIForge(forgeName)
if err != nil {
r.AddToTimeline("[BLUEPRINT_NOT_FOUND]",
fmt.Sprintf("AI Blueprint '%s' does not exist", forgeName))
return nil, nil, utils.Errorf("AI Blueprint '%s' not found: %v", forgeName, err)
}
if ins == nil {
r.AddToTimeline("[BLUEPRINT_NULL_INSTANCE]",
fmt.Sprintf("AI Blueprint '%s' returned nil instance", forgeName))
return nil, nil, utils.Errorf("AI Blueprint '%s' instance is nil", forgeName)
}
// 记录成功查找
r.AddToTimeline("[BLUEPRINT_FOUND]",
fmt.Sprintf("AI Blueprint: %s (%s)", ins.ForgeName, ins.ForgeVerboseName))
// 生成参数模式
forgeSchema, err := manager.GenerateAIJSONSchemaFromSchemaAIForge(ins)
if err != nil {
return nil, nil, utils.Errorf("generate schema failed: %v", err)
}
// 使用 AI 从当前上下文提取参数
prompt, err := r.promptManager.GenerateAIBlueprintForgeParamsPrompt(ins, forgeSchema)
if err != nil {
return nil, nil, utils.Errorf("generate prompt failed: %v", err)
}
var forgeParams = make(aitool.InvokeParams)
err = aicommon.CallAITransaction(
r.config, prompt, r.config.CallAI,
func(rsp *aicommon.AIResponse) error {
action, err := aicommon.ExtractActionFromStream(
r.config.GetContext(),
rsp.GetOutputStreamReader("call-forge", false, r.config.GetEmitter()),
"call-ai-blueprint",
)
if err != nil {
return utils.Errorf("extract action failed: %v", err)
}
forgeParams = action.GetInvokeParams("params")
if len(forgeParams) <= 0 {
return utils.Error("forge params is empty")
}
return nil
},
)
if err != nil {
return nil, nil, err
}
return ins, forgeParams, nil
}
9.4 使用场景
| 蓝图类型 | 领域 | 示例工作流 |
|---|---|---|
| Java 审计 Forge | 安全 | 代码审查 → 漏洞扫描 → 报告生成 |
| 渗透测试 Forge | 安全 | 侦察 → 扫描 → 利用 → 报告 |
| 文档 Forge | DevOps | 代码分析 → API 提取 → 文档生成 |
| 迁移 Forge | DevOps | 依赖分析 → 代码转换 → 测试 |
10. 双引擎架构解决的问题
10.1 "迷失方向"问题
症状:纯 ReAct 代理在执行 10+ 步后经常忘记其高层目标,变得短视地专注于即时子问题。
根本原因:缺乏层次化目标表示;所有目标被扁平化到即时提示中。
解决方案:Plan 引擎维护 全局任务状态。即使子任务需要 50+ 次迭代,父 Coordinator 也确切知道它在整体路线图中的位置。进度通过响应式数据构建器持续反馈到每次 ReAct 迭代。
// 每次迭代接收完整的进度上下文
reactiveData := fmt.Sprintf(`
<|PROGRESS_TASK|>
%s
--- CURRENT_TASK ---
%s
<|PROGRESS_TASK_END|>
`, t.rootTask.Progress(), t.Progress())
10.2 "僵化"问题
症状:纯 Plan-Execute 代理在初始计划有缺陷时失败(例如,"扫描服务器 A"失败因为服务器 A 宕机)。
根本原因:无运行时适应能力;假设计划在生成时是完美的。
解决方案:ReAct 引擎处理 运行时适应。它可以:
- 使用不同参数重试
- 跳过不可用资源
- 通过
RequestPlanExecution触发重规划 - 通过交互请求用户指导
10.3 "复杂度视界"问题
症状:没有单一提示可以在 LLM 上下文限制内处理需要 100+ 工具的任务。
根本原因:LLM 上下文窗口限制;推理深度的认知负载限制。
解决方案:分形分解。复杂任务被递归分解,直到每个叶子任务适应 LLM 的上下文窗口和推理能力。
原始任务 (需要 100 个工具)
├── 子任务 A (30 个工具) → 仍然太复杂
│ ├── 子任务 A.1 (10 个工具) ✓ 可执行
│ ├── 子任务 A.2 (10 个工具) ✓ 可执行
│ └── 子任务 A.3 (10 个工具) ✓ 可执行
├── 子任务 B (40 个工具) → 仍然太复杂
│ └── ... (递归分解)
└── 子任务 C (30 个工具) → 仍然太复杂
└── ... (递归分解)
10.4 对比分析
| 问题 | 传统代理 | Memfit 双引擎 |
|---|---|---|
| 迷失方向 | ~10 步后失败 | 无限期保持全局上下文 |
| 僵化规划 | 单一计划,无适应 | 任意级别动态重规划 |
| 复杂度视界 | ~20 工具限制 | 通过递归无限制 |
| 错误恢复 | 仅逐动作重试 | 多层级恢复策略 |
| 人类监督 | 难以干预 | 任意任务级别可跳过/重做 |
11. 性能特征
11.1 计算复杂度
| 操作 | 时间复杂度 | 空间复杂度 |
|---|---|---|
| 任务树构建 | O(n) | O(n) |
| DFS 遍历 | O(n) | O(d),d = 最大深度 |
| 索引查找 | O(n) | O(1) |
| 事件镜像 | O(m),m = 注册镜像数 | O(m) |
11.2 内存管理
系统通过 Timeline 压缩实现智能内存管理:
- 逐项限制:单个时间线项有内容大小限制
- 批量压缩:空间受限时可将多个项一起压缩
- 选择性保留:重要项(错误、用户交互)优先保留
11.3 并发模型
主线程 异步操作
│ │
├── Coordinator.Run() │
│ │ │
│ ├── planRequest.Invoke() ───────► AI 调用 (goroutine)
│ │ │
│ ├── 用户审查 (阻塞) │
│ │ │
│ └── runtime.Invoke() │
│ │ │
│ ├── 任务 1 ───────────► ReAct Loop (goroutine)
│ │ │ │
│ │ │ └── AsyncPlanAndExecute
│ │ │ │
│ │ │ └── 子 Coordinator
│ │ │
│ └── 任务 2 (任务 1 完成后)
│ │
└──────────────────────────────
12. 结论
递归式双引擎架构代表了构建能够处理任意复杂度任务的自主 AI 代理的原则性方法。通过将战略规划与战术执行相结合,并支持两层之间的递归调用,Memfit AI 实现了:
- 可扩展性:任意复杂度的任务都可以通过分形递归分解到可管理
- 鲁棒性:任意层级的失败都会通过自我反思触发适当的恢复机制
- 透明性:层次化进度跟踪使人类监督能够覆盖每个层级
- 灵活性:动态重规划通过规划即动作适应运行时条件
- 上下文保持:共享 Timeline 确保跨递归级别不丢失信息
该架构同时植根于认知科学(双过程理论)和经典人工智能(层次任务网络),提供了坚实的理论基础,而代码支撑的实现确保了在实际场景中的可部署性。
参考资料
学术文献
- Yao, S. et al. (2022). ReAct: Synergizing Reasoning and Acting in Language Models. ICLR 2023.
- Wang, L. et al. (2023). Plan-and-Solve Prompting: Improving Zero-Shot Chain-of-Thought Reasoning. ACL 2023.
- Erol, K. et al. (1994). HTN Planning: Complexity and Expressivity. AAAI 1994.
- Kahneman, D. (2011). Thinking, Fast and Slow. Farrar, Straus and Giroux.
- Boyd, J. (1987). A Discourse on Winning and Losing. (OODA Loop 概念化)
代码库参考
common/ai/aid/task.go— AiTask 结构和层次索引common/ai/aid/task_dfs.go— DFS 遍历算法common/ai/aid/coordinator.go— Coordinator 编排common/ai/aid/runtime.go— 任务调度和执行common/ai/aid/plan.go— 计划生成和任务提取common/ai/aid/task_execute.go— 带上下文传播的任务执行common/ai/aid/aireact/reactloops/reactloop.go— ReAct Loop 实现common/ai/aid/aireact/reactloops/exec.go— OODA 执行循环common/ai/aid/aireact/invoke_plan_and_execute.go— 递归调用common/ai/aid/aireact/invoke_blueprint.go— AI 蓝图处理common/ai/aid/aireact/reactloops/loopinfra/action_request_plan_and_execution.go— 规划即动作common/ai/aid/aireact/reactloops/loopinfra/action_require_ai_blueprint_forge.go— 蓝图动作common/ai/aid/aicommon/taskif.go— 任务状态机